工程师创建气动计算机存储器以控制软体机器人
来源:cnBeta 2021-07-19 09:45:36
原标题:工程师创建气动计算机存储器以控制软体机器人 来源:cnBeta.COM
据外媒报道,来自加州大学河滨分校的工程师揭示了一种新的创造,旨在控制软体机器人的运动。工程师们揭示了一种以空气为动力的计算机存储器系统,它克服了推进软体机器人技术的最大障碍之一。这个主要障碍是气动装置和电子装置之间的不匹配。
通常情况下,软体机器人的运动是通过空气进入和离开机器人内部的囊体来控制的。软体机器人的四肢是灵活的、橡胶的,通常有抓手,软体机器人在执行某些任务时可以优于传统的刚性机器人,特别是那些精细的任务。软体机器人与人类一起工作也更安全,因此成为全世界研究人员的主要调查焦点。现有的控制气动软体机器人的系统使用电子阀和计算机来控制运动部件的位置。
电子部件大大增加了软体机器人的成本、尺寸和功率需求,限制了它们的实用性。研究人员创建了一个利用 “气动逻辑 ”的系统。气动逻辑的理论早于电子计算机,在20世纪初曾被用于为气候控制系统和其他任务的部件提供先进的控制水平。在气动逻辑系统中,空气而不是电力流向计算机通道,并代表开启或关闭。
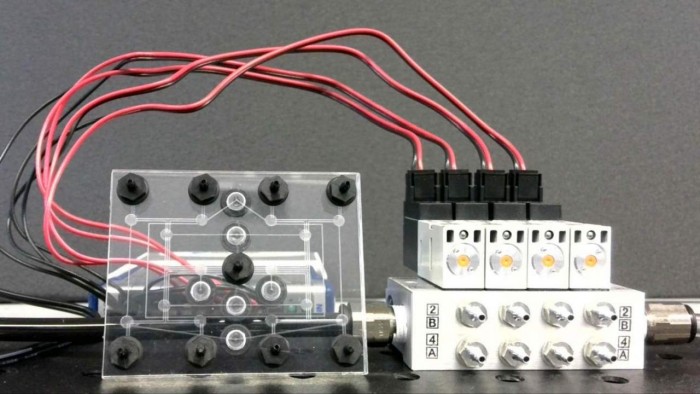
该团队意识到他们可以为软体机器人创建气动逻辑存储器,使其能够记住并保持移动部件的位置。科学家们还利用微流控阀而不是电子晶体管构建了RAM芯片。微流控阀最初被设计用来控制液体的流动和控制空气的流动。系统中的阀门对压力差进行密封,即使与空气供应线断开,也会产生被困的压力差,作为记忆维持机器人的执行状态。
该团队修改了微流体阀门,以处理更大的气流速率,产生一个八位气动RAM芯片,控制更大、更快的软体机器人。该系统被纳入一双3D打印的橡胶手中。该系统的特点是柔软的机器人手指在连接到大气压力时伸展,连接到真空时收缩。该团队能够让他们的软体机器人手在钢琴上演奏一曲。
相关文章





猜你喜欢
今日头条
图文推荐





精彩文章
